Testing Forward and Inverse Hankel Transform¶
This is a simple demo to show how to compute the forward and inverse Hankel transform.
We use the function \(f(r) = 1/r\) as an example function. This function is unbounded at \(r=0\) and therefore causes problems with convergence at the origin.
In [16]:
# Import libraries
import numpy as np # To define grid
from hankel import HankelTransform # Transforms
from scipy.interpolate import InterpolatedUnivariateSpline as spline # Spline
import matplotlib.pyplot as plt # Plotting
%matplotlib inline
In [2]:
# Define grid
r = np.linspace(1e-2,1,1000) # Define a physical grid
k = np.logspace(-3,2,100) # Define a spectral grid
In [3]:
# Compute Forward Hankel transform
f = lambda x : 1/x # Sample Function
h = HankelTransform(nu=0,N=1000,h=0.005) # Create the HankelTransform instance, order zero
hhat = h.transform(f,k,ret_err=False) # Return the transform of f at k.
In [4]:
# Compute Inverse Hankel transform
hhat_sp = spline(k, hhat) # Define a spline to approximate transform
f_new = h.transform(hhat_sp, r, False, inverse=True) # Compute the inverse transform
In [15]:
# Plot the original function and the transformed functions
fig,ax = plt.subplots(2,1,sharex=True,gridspec_kw={"hspace":0})
ax[0].semilogy(r,f(r), linewidth=2,label='original')
ax[0].semilogy(r,f_new,ls='--',linewidth=2,label='transformed')
ax[0].grid('on')
ax[0].legend(loc='best')
#ax[0].axis('on')
ax[1].plot(r,np.abs(f(r)/f_new-1))
ax[1].set_yscale('log')
ax[1].set_ylim(None,30)
ax[1].grid('on')
ax[1].set_ylabel("Rel. Diff.")
plt.show()
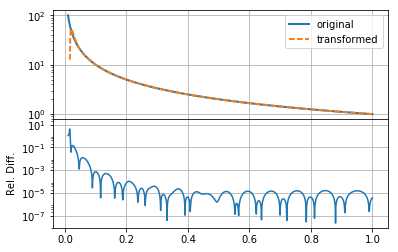
In practice, there are three aspects that affect the accuracy of the round-trip transformed function, other than the features of the function itself:
- the value of
N, which controls the the upper limit of the integral (and must be high enough for convergence), - the value of
h, which controls the resolution of the array used to do integration. Most importantly, controls the position of the first sample of the integrand. In a function such as \(1/r\), or something steeper, this must be small to capture the large amount of information at low \(r\). - the resolution/range of \(k\), which is used to define the function which is inverse-transformed.