Getting Started with Hankel¶
Usage and Description¶
Setup¶
This implementation is set up to allow efficient calculation of multiple functions \(f(x)\). To do this, the format is class-based, with the main object taking as arguments the order of the Bessel function, and the number and size of the integration steps (see Limitations for discussion about how to choose these key parameters).
For any general integration or transform of a function, we perform the following setup:
In [1]:
from hankel import HankelTransform # Import the basic class
ht = HankelTransform(nu= 0, # The order of the bessel function
N = 120, # Number of steps in the integration
h = 0.03) # Proxy for "size" of steps in integration
Alternatively, each of the parameters has defaults, so you needn’t pass any. The order of the bessel function will be defined by the problem at hand, while the other arguments typically require some exploration to set them optimally.
Integration¶
A Hankel-type integral is the integral
Having set up our transform with nu = 0, we may wish to perform this
integral for \(f(x) = 1\). To do this, we do the following:
In [3]:
# Create a function which is identically 1.
f = lambda x : 1
ht.integrate(f)
Out[3]:
(1.0000000000003486, -9.8381428368537518e-15)
The correct answer is 1, so we have done quite well. The second element
of the returned result is an estimate of the error (it is the last term
in the summation). The error estimate can be omitted using the argument
ret_err=False.
We may now wish to integrate a different function, say \(x/(x^2 + 1)\). We can do this directly with the same object, without re-instantiating (avoiding unnecessary recalculation):
In [4]:
f = lambda x : x/(x**2 + 1)
ht.integrate(f)
Out[4]:
(0.42098875721567186, -2.6150757700135774e-17)
The analytic answer here is \(K_0(1) = 0.4210\). The accuracy could
be increased by creating ht with a higher number of steps N, and
lower stepsize h (see Limitations).
Transforms¶
The Hankel transform is defined as
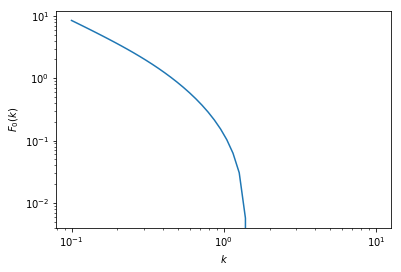
We see that the Hankel-type integral is the Hankel transform of \(f(r)/r\) with \(k=1\). To perform this more general transform, we must supply the \(k\) values. Again, let’s use our previous function, \(x/(x^2 + 1)\).
First we’ll import some libraries to help us visualise:
In [7]:
import numpy as np # Import numpy
import matplotlib.pyplot as plt
%matplotlib inline
Now do the transform,
In [ ]:
k = np.logspace(-1,1,50) # Create a log-spaced array of k from 0.1 to 10.
Fk = ht.transform(f,k,ret_err=False) # Return the transform of f at k.
and finally plot it:
In [11]:
plt.plot(k,Fk)
plt.xscale('log')
plt.yscale('log')
plt.ylabel(r"$F_0(k)$")
plt.xlabel(r"$k$")
plt.show()
Fourier Transforms¶
One of the most common applications of the Hankel transform is to solve the radially symmetric n-dimensional Fourier transform:
We provide a specific class to do this transform, which takes into
account the various normalisations and substitutions required, and also
provides the inverse transform. The procedure is similar to the basic
HankelTransform, but we provide the number of dimensions, rather
than the Bessel order directly.
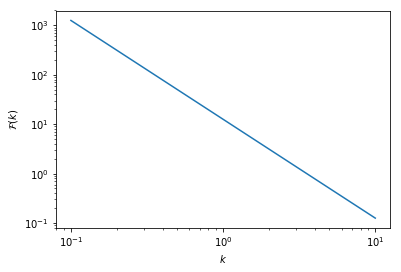
Say we wish to find the Fourier transform of \(f(r) = 1/r\) in 3 dimensions:
In [12]:
# Import the Symmetric Fourier Transform class
from hankel import SymmetricFourierTransform
# Create our transform object, similar to HankelTransform,
# but with ndim specified instead of nu.
ft = SymmetricFourierTransform(ndim=3, N = 200, h = 0.03)
# Create our kernel function to be transformed.
f = lambda r : 1./r
# Perform the transform
Fk = ft.transform(f,k, ret_err=False)
In [13]:
plt.plot(k,Fk)
plt.xscale('log')
plt.yscale('log')
plt.ylabel(r"$\mathcal{F}(k)$")
plt.xlabel(r"$k$")
plt.show()
To do the inverse transformation (which is different by a normalisation
constant), merely supply inverse=True to the .transform()
method.
Limitations¶
Efficiency¶
An implementation-specific limitation is that the method is not perfectly efficient in all cases. Care has been taken to make it efficient in the general sense. However, for specific orders and functions, simplifications may be made which reduce the number of trigonometric functions evaluated. For instance, for a zeroth-order spherical transform, the weights are analytically always identically 1.
Lower-Bound Convergence¶
In terms of limitations of the method, they are very dependent on the form of the function chosen. Notably, functions which tend to infinity at x=0 will be poorly approximated in this method, and will be highly dependent on the step-size parameter, as the information at low-x will be lost between 0 and the first step. As an example consider the simple function \(f(x) = 1/\sqrt{x}\) with a 1/2 order bessel function. The total integrand tends to 1 at \(x=0\), rather than 0:
In [14]:
f = lambda x: 1/np.sqrt(x)
h = HankelTransform(0.5,120,0.03)
h.integrate(f)
Out[14]:
(1.2336282257874065, -2.864861354876958e-16)
The true answer is \(\sqrt{\pi/2}\), which is a difference of about 1.6%. Modifying the step size and number of steps to gain accuracy we find:
In [15]:
h = HankelTransform(0.5,700,0.001)
h.integrate(f)
Out[15]:
(1.2523045155005623, -0.0012281146007915768)
This has much better than percent accuracy, but uses 5 times the amount of steps. The key here is the reduction of h to “get inside” the low-x information. This limitation is amplified for cases where the function really does tend to infinity at \(x=0\), rather than a finite positive number, such as \(f(x)= 1/x\). Clearly the integral becomes non-convergent for some \(f(x)\), in which case the numerical approximation can never be correct.
Upper-Bound Convergence¶
If the function \(f(x)\) is monotonically increasing, or at least
very slowly decreasing, then higher and higher zeros of the Bessel
function will be required to capture the convergence. Often, it will be
the case that if this is so, the amplitude of the function is low at low
\(x\), so that the step-size h can be increased to facilitate
this. Otherwise, the number of steps N can be increased.
For example, the 1/2-order integral supports functions that are increasing up to \(f(x) = x^{0.5}\) and no more (otherwise they diverge). Let’s use \(f(x) = x^{0.4}\) as an example of a slowly converging function, and use our “hi-res” setup from the previous section:
In [16]:
h = HankelTransform(0.5,700,0.001)
f = lambda x : x**0.4
h.integrate(f)
Out[16]:
(0.5367827792529053, -1.0590954621251101)
The analytic result is 0.8421449 – very far from our result. Note that
in this case, the error estimate itself is a good indication that we
haven’t reached convergence. We could try increasing N:
In [17]:
h = HankelTransform(0.5,10000,0.001)
h.integrate(f,ret_err=False)/0.8421449 -1
hankel/hankel.py:72: RuntimeWarning: overflow encountered in sinh
a = (np.pi*t*np.cosh(t) + np.sinh(np.pi*np.sinh(t)))/(1.0 + np.cosh(np.pi*np.sinh(t)))
hankel/hankel.py:72: RuntimeWarning: overflow encountered in cosh
a = (np.pi*t*np.cosh(t) + np.sinh(np.pi*np.sinh(t)))/(1.0 + np.cosh(np.pi*np.sinh(t)))
hankel/hankel.py:72: RuntimeWarning: invalid value encountered in divide
a = (np.pi*t*np.cosh(t) + np.sinh(np.pi*np.sinh(t)))/(1.0 + np.cosh(np.pi*np.sinh(t)))
Out[17]:
7.1335646079084825e-07
This is very accurate, but quite slow. Alternatively, we could try
increasing h:
In [18]:
h = HankelTransform(0.5,700,0.03)
h.integrate(f,ret_err=False)/0.8421449 -1
Out[18]:
0.00045613842025526985
Not quite as accurate, but still far better than a percent for a hundredth of the cost!
There are some notebooks in the devel/ directory which toy with some
known integrals, and show how accurate different choices of N and
h are. They are interesting to view to see some of the patterns.